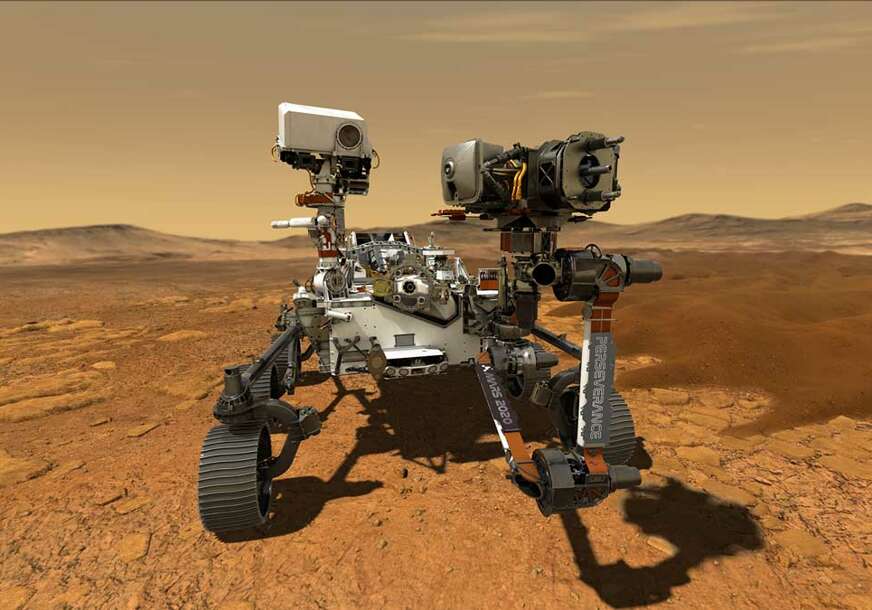
Ipak, čak i najnoviji članovi robotske flote, poput slavnog Perseverancea, imaju značajna ograničenja.
Prvo i najočiglednije jeste njihova brzina. Perseverance, kojeg NASA smatra tehnološkim čudom, na ravnom terenu postiže maksimalnu brzinu od jedva 0,16 km/h. Uz to, grubi marsovski teren izuzetno je zahtjevan za njihove točkove, a strme padine posute kamenjem i pijeskom predstavljaju pravi izazov, često zahtijevajući duga zaobilaženja kako bi se došlo do naučno zanimljivih lokacija.
Međutim, NASA je nedavno pokazala napredak na prototipu koji donosi znatno naprednije mogućnosti i obećava novu eru planetarnog istraživanja. Njegovo ime je Ernest.
Šta donosi projekt ERNEST?
Puni naziv projekta je ERNEST (Exploration Rover for Navigating Extreme Sloped Terrain), a riječ je o roveru dizajniranom za navigaciju na ekstremno strmim terenima. Svemirska agencija posljednjih sedmica intenzivno ga testira u kalifornijskoj pustinji Colorado, istražujući nuove pristupe koji bi se mogli koristiti u budućim misijama na Marsu i Mjesecu.
Tokom sedam dana povremenih testiranja, prototip je u 37 sati vožnje prešao otprilike 26 kilometara i postigao maksimalnu brzinu od oko jednog kilometra na sat. Iako se to ne čini mnogo, to je skoro deset puta brže od Perseverancea.
Uporedni pregled: Perseverance vs. Ernest
| Karakteristika | Rover Perseverance | Prototip ERNEST |
| Maksimalna brzina | 0,16 km/h | 1 km/h (skoro 10 puta brže) |
| Broj točkova | 6 točkova | 4 točka |
| Dužina vozila | Oko 3 metra | 1,2 metra (operativna verzija biće duplo veća) |
| Sistem vješanja | Pasivni (rocker-bogie) | Aktivno vješanje (puzanje, hodanje, penjanje) |
| Upravljanje | Visok stepen kontrole sa Zemlje | Napredna autonomija (samostalno odlučivanje) |
Revolucionarno aktivno vješanje “ispod haube”
Ono što Ernesta zaista izdvaja od njegovih prethodnika jeste tehnologija vješanja. Još od rovera Sojourner iz 1997. godine, svi NASA-ini roveri oslanjali su se na pasivni sistem vješanja poznat kao “rocker-bogie”, dizajniran da održava stalan pritisak na svim točkovima i tako osigura stabilnost. Inženjeri sada s Ernestom isprobavaju aktivno vješanje kako bi postigli znatno veću pokretljivost.
– Dva pogonska zgloba na prednjem dijelu pokreću kardanski sklop koji roveru omogućava korištenje različitih načina kretanja, poput puzanja, hodanja na točkovima i penjanja preko prepreka – pojašnjavaju iz NASA-e.
Ovaj sistem omogućava roveru da aktivno upravlja raspodjelom težine među točkovima, što mu daje agilnost kakvu dosad nismo vidjeli. Zavisno od zadatka i energetskih potreba, Ernest se može prebacivati između aktivnog i pasivnog načina rada vješanja, a zahvaljujući četirima upravljivim točkovima, može se kretati u bilo kojem smjeru.
Program je započeo 2022. godine i ovo je već treća iteracija prototipa, a tim je dosad testirao skoro desetak različitih konfiguracija aktivnog vješanja. Najnovija verzija takođe ima poboljšane sposobnosti nezavisnog donošenja odluka, što znači da se može samostalno kretati s puno manje intervencija ljudskih kontrolora sa Zemlje.
Budućnost planetarnog istraživanja
Cilj projekta Ernest je razviti tehnologiju za rovere koji mogu preći veće udaljenosti, brže i autonomnije nego ikada prije. Dok je prvi rover Sojourner prešao jedva stotinjak metara, a rekorder Opportunity više od 45 kilometara tokom svog dugog radnog vijeka, potreba za bržim i sposobnijim istraživačima raste.
Naučnici žele istražiti teško dostupna mjesta poput strmih zidova kratera, gdje bi se mogli kriti ključni dokazi o prošlosti planete.
– S ovim vozilom mogli biste ići na naučno putovanje po Mjesecu ili Marsu – izjavio je James Keane, planetarni naučnik iz NASA-inog Laboratorija za mlazni pogon (JPL).
Razvoj rovera poput Ernesta dio je šireg trenda koji teži većoj autonomiji i mobilnosti. U tom smjeru idu i drugi koncepti, poput NASA-inog rovera DuAxel koji se može razdvojiti na dva dijela za spuštanje niz litice, ili misije Rosalind Franklin Evropske svemirske agencije, čiji će rover bušiti do dva metra ispod površine Marsa u potrazi za znakovima života.
Saznajte sve o najvažnijim vijestima i događajima, čitajte na Google News.